空拍機地形測繪-WebODM架設實戰
前言
本篇文章為空拍機地形測繪第二篇,空拍照片搭配地面控制點進行換算,內業處理工具使用 WebODM ,該工具為開源軟體,可以搭配Docker進行安裝,由本地端的硬體資源進行運算。
若照片量體較大導致本地端解算不穩定,除了利用Docker本身的參數進行調校硬體配置外,也能透過訂閱 WebODM Lightning 進行穩定的輸出,相較於其他訂閱軟體也是個比較經濟的選擇。
本地端安裝
官方有提供比較簡易的一鍵安裝程式(要付費)以及Docker環境建立。
以前看到WebODM想說太好了,我可以把它安裝起來操作看看,後來才知道要完全無料使用的話還需要具備Docker基礎知識,礙於當時對Docker認知不足遲遲無法進行操作。
必要套件
- python
- git
- docker
啟動
windows的CMD跟powershell不能直接用,需要在git bash中才可以
1 | git clone https://github.com/OpenDroneMap/WebODM |
產製目標
正射影像
如果只是單純要放在簡報用的,倒不一定要製作地面控制點
DTM
若精度要求至cm級,則需要搭配地面控制點進行點雲計算。
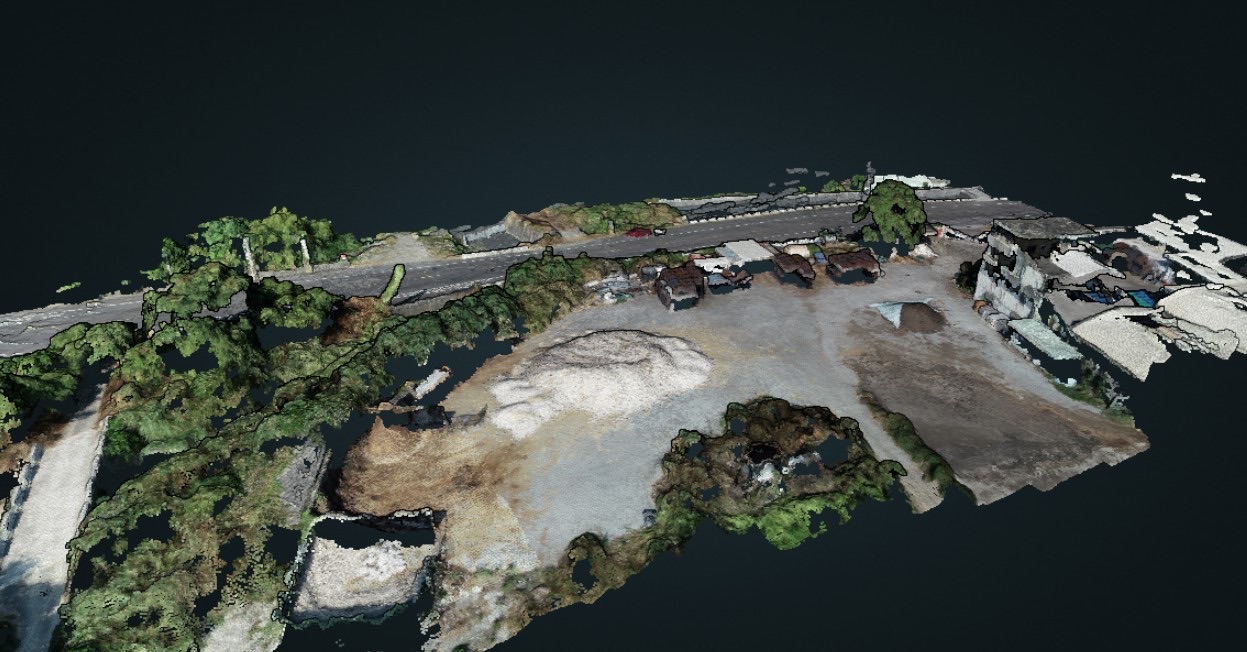
3DMesh
若精度要求至cm級,則需要搭配地面控制點進行點雲計算,但這部分容易遭遇記憶體不足的問題(本人身受其害)。
操作步驟
註冊或登入

進入主控台

新增專案

選擇影像與GCP

參數設定
這裡需要調整的只有選項跟重新調整影像大小 >正射影像選Fast Orthophoto,DTM選DSM+DTM,當然也能進編輯做些更細部的調整,這部分有需要再來異動吧!

點選再檢視

點選開始處理

任務完成

踩坑過程記錄
選項參數設定誤解
split,讓大量照片可以切分區域進行運算後再拼接,經測試後發現變小對於記憶體反而是吃力的,split=100結果出現error,split=500結果正常。
可觀測性不佳
曾經睡前開啟比較繁雜的任務,結果睡著不到1小時就出現記憶體不足或者硬碟不足導致docker shutdown,白白浪費一個晚上的計算時間。
解法1:電腦建立好WebODM的時候可以透過localhost:8000來操作,如果不想在那邊顧機器,又突然想要進去看是不是有異常,此時可透過網關設定動態網址後並由外部連線轉發至該電腦的localhost:8000,雖然還是要人去看,但至少可以遠端操作。
解法2:webODM有API可以呼叫,並且可以傳遞目前的任務進行情況,從Telegram的通道進行通知,這是不需要人去看的最佳方案,當然相對細節也比較多,涉及如何生成TelegramBot的流程以及API本身的回傳判釋操作,有機會再來寫一篇文章。
GCP精度不足
為照片重疊率不夠高的問題,原本的1秒1張取樣我設置為5秒1張,導致重疊率不夠高,某一個GCP點只有算到1張照片,導致該點的Z值誤差高達60cm,整份點雲不能使用,後來我改為2秒1張就可以順利通過品質報告了!
內建GCP介面難用
內建的需要用眼睛一張一張去找出點資料在哪裡然後標記、點右側面板的控制點,這實在非常的花時間,好在有國外神人針對這個問題想出從點資料與照片GPS位置進行座標換算,濾出由近而遠的照片,就只要點過濾好的照片就好,永久版一次性費用29美金,但是可以省下大量時間,已購。
雖有提供原始碼可以自行部署,不曉得為何我用本機安裝及用docker安裝就會失敗,每次都死在建立 eletron?!
記憶體不足
docker預設swap為本機RAM+2swap,16GB的電腦可以保留4GB給電腦用,其他開給docker,並且可以設定為6swap
在C:<你的帳號>下建立一個 .wslconfig
1 | [wsl2] |
硬碟不足
docker預設會將 .vhdx 放置於C:,然而往往C槽很容易爆掉。
電腦重新開機後,不要開啟docker,找出
C:\User\<你的帳號>\AppData\Local\Docker\wsl\disk,非常大的話,就可以改去D:\ Docker
設定方式可以透過 Docker Desktop > Setting > Resource > 選擇要放置Disk的位置(建議是去D槽,畢竟D槽空間通常比較大)